|
|
| (One intermediate revision by the same user not shown) |
| Line 41: |
Line 41: |
| | |} | | |} |
| | | | |
| − | Note: Some authors define the range of arcsecant to be <math> \big( 0 \leq y < \tfrac{\pi}{2} \text{ or } \pi < y \leq \tfrac{3 \pi}{2} \big)</math>, because the tangent function is nonnegative on this domain. This makes some computations more consistent. For example, using this range, <math>\tan(\arcsec(x)) = \sqrt{x^2 - 1},</math> whereas with the range <math> \big( 0 \leq y < \tfrac{\pi}{2} \text{ or } \tfrac{\pi}{2} < y \leq \pi \big) </math>, we would have to write <math>\tan(\arcsec(x)) = \pm \sqrt{x^2 - 1},</math> since tangent is nonnegative on <math>0 \leq y < \tfrac{\pi}{2},</math> but nonpositive on <math>\tfrac{\pi}{2} < y \leq \pi.</math> For a similar reason, the same authors define the range of arccosecant to be <math> \big(- \pi < y \leq - \tfrac{\pi}{2}</math> \text{ or } 0 < y \leq \tfrac{\pi}{2} \big).</math> | + | Note: Some authors define the range of arcsecant to be <math> \big( 0 \leq y < \tfrac{\pi}{2} \text{ or } \pi < y \leq \tfrac{3 \pi}{2} \big)</math>, because the tangent function is nonnegative on this domain. This makes some computations more consistent. For example, using this range, <math>\tan(\arcsec(x)) = \sqrt{x^2 - 1},</math> whereas with the range <math> \big( 0 \leq y < \tfrac{\pi}{2} \text{ or } \tfrac{\pi}{2} < y \leq \pi \big) </math>, we would have to write <math>\tan(\arcsec(x)) = \pm \sqrt{x^2 - 1},</math> since tangent is nonnegative on <math>0 \leq y < \tfrac{\pi}{2},</math> but nonpositive on <math>\tfrac{\pi}{2} < y \leq \pi.</math> For a similar reason, the same authors define the range of arccosecant to be <math> \big(- \pi < y \leq - \tfrac{\pi}{2} \text{ or } 0 < y \leq \tfrac{\pi}{2} \big).</math> |
| | | | |
| | If <math>x</math> is allowed to be a complex number, then the range of <math>y</math> applies only to its real part. | | If <math>x</math> is allowed to be a complex number, then the range of <math>y</math> applies only to its real part. |
| Line 158: |
Line 158: |
| | |} | | |} |
| | | | |
| − | So for example, by using the equality <math>\sin \left(\frac{\pi}{2} - \theta\right) = \cos \theta</math> (found in the table above at row <math>\;\operatorname{func} = \sin\;</math> and column <math>\;\operatorname{func}\left(\frac{\pi}{2} - \theta\right)</math>), the equation <math>\cos \theta = x</math> can be transformed into <math>\sin \left(\frac{\pi}{2} - \theta\right) = x,</math> which allows for the solution to the equation <math>\;\sin \varphi = x\;</math> (where <math>\varphi := \frac{\pi}{2} - \theta</math>) to be used; that solution being: | + | So for example, by using the equality <math>\sin \left(\frac{\pi}{2} - \theta\right) = \cos \theta</math>, the equation <math>\cos \theta = x</math> can be transformed into <math>\sin \left(\frac{\pi}{2} - \theta\right) = x,</math> which allows for the solution to the equation <math>\;\sin \varphi = x\;</math> (where <math>\varphi := \frac{\pi}{2} - \theta</math>) to be used; that solution being: |
| | <math>\varphi = (-1)^k \arcsin (x) + \pi k \; \text{ for some } k \in \Z,</math> | | <math>\varphi = (-1)^k \arcsin (x) + \pi k \; \text{ for some } k \in \Z,</math> |
| | which becomes: | | which becomes: |
| Line 164: |
Line 164: |
| | where using the fact that <math>(-1)^{k} = (-1)^{-k}</math> and substituting <math>h := - k</math> proves that another solution to <math>\;\cos \theta = x\;</math> is: | | where using the fact that <math>(-1)^{k} = (-1)^{-k}</math> and substituting <math>h := - k</math> proves that another solution to <math>\;\cos \theta = x\;</math> is: |
| | <math display="block">\theta ~=~ (-1)^{h+1} \arcsin (x) + \pi h + \frac{\pi}{2} \quad \text{ for some } h \in \Z.</math> | | <math display="block">\theta ~=~ (-1)^{h+1} \arcsin (x) + \pi h + \frac{\pi}{2} \quad \text{ for some } h \in \Z.</math> |
| − | The substitution <math>\;\arcsin x = \frac{\pi}{2} - \arccos x\;</math> may be used express the right hand side of the above formula in terms of <math>\;\arccos x\;</math> instead of <math>\;\arcsin x.\;</math> | + | The substitution <math>\;\arcsin x = \frac{\pi}{2} - \arccos x\;</math> may be used express the right hand side of the above formula in terms of <math>\;\arccos x\;</math> instead of <math>\;\arcsin x.\;</math> |
| − | <!--
| |
| − | {|class="wikitable" style="background-color: #FFFFFF"
| |
| − | |rowspan="2" colspan="3"! {{diagonal split header|Function|<math>\varphi</math>}}
| |
| − | !style='border-style: solid solid none solid;'|<math>\sin \varphi</math>
| |
| − | !style='border-style: solid solid none solid;'|<math>\cos \varphi</math>
| |
| − | !style='border-style: solid solid none solid;'|<math>\tan \varphi</math>
| |
| − | !style='border-style: solid solid none solid;'|<math>\csc \varphi</math>
| |
| − | !style='border-style: solid solid none solid;'|<math>\sec \varphi</math>
| |
| − | !style='border-style: solid solid none solid;'|<math>\cot \varphi</math>
| |
| − | |-
| |
| − | <!-- Spanned from above --><!--
| |
| − | !style='border-style: none solid solid solid;'|<math>\scriptstyle|\,\scriptstyle|</math>
| |
| − | !style='border-style: none solid solid solid;'|<math>\scriptstyle|\,\scriptstyle|</math>
| |
| − | !style='border-style: none solid solid solid;'|<math>\scriptstyle|\,\scriptstyle|</math>
| |
| − | !style='border-style: none solid solid solid;'|<math>\scriptstyle|\,\scriptstyle|</math>
| |
| − | !style='border-style: none solid solid solid;'|<math>\scriptstyle|\,\scriptstyle|</math>
| |
| − | !style='border-style: none solid solid solid;'|<math>\scriptstyle|\,\scriptstyle|</math>
| |
| − | |-
| |
| − | |style='border-style: solid none solid solid; text-align: right; padding-left: 2em;'|<math>\varphi</math>
| |
| − | |style='border-style: solid none solid none; text-align: right; padding-left: ;'|<math>=</math>
| |
| − | |style='border-style: solid solid solid none; text-align: right; padding-left: ;'|<math>- \theta</math>
| |
| − | |style='text-align: right;'|<math>- \sin \theta</math>
| |
| − | |style='text-align: right;'|<math>\cos \theta</math>
| |
| − | |style='text-align: right;'|<math>- \tan \theta</math>
| |
| − | |style='text-align: right;'|<math>- \csc \theta</math>
| |
| − | |style='text-align: right;'|<math>\sec \theta</math>
| |
| − | |style='text-align: right;'|<math>- \cot \theta</math>
| |
| − | |-
| |
| − | |style='border-style: solid none solid solid; text-align: right; padding-left: 2em;'|<math>\varphi</math>
| |
| − | |style='border-style: solid none solid none; text-align: right; padding-left: ;'|<math>=</math>
| |
| − | |style='border-style: solid solid solid none; text-align: right; padding-left: ;'|<math>\frac{\pi}{2} - \theta</math>
| |
| − | |style='text-align: right;'|<math>\cos \theta</math>
| |
| − | |style='text-align: right;'|<math>\sin \theta</math>
| |
| − | |style='text-align: right;'|<math>\cot \theta</math>
| |
| − | |style='text-align: right;'|<math>\sec \theta</math>
| |
| − | |style='text-align: right;'|<math>\csc \theta</math>
| |
| − | |style='text-align: right;'|<math>\tan \theta</math>
| |
| − | |-
| |
| − | |style='border-style: solid none solid solid; text-align: right; padding-left: 2em;'|<math>\varphi</math>
| |
| − | |style='border-style: solid none solid none; text-align: right; padding-left: ;'|<math>=</math>
| |
| − | |style='border-style: solid solid solid none; text-align: right; padding-left: ;'|<math>\pi - \theta</math>
| |
| − | |style='text-align: right;'|<math>\sin \theta</math>
| |
| − | |style='text-align: right;'|<math>- \cos \theta</math>
| |
| − | |style='text-align: right;'|<math>- \tan \theta</math>
| |
| − | |style='text-align: right;'|<math>\csc \theta</math>
| |
| − | |style='text-align: right;'|<math>- \sec \theta</math>
| |
| − | |style='text-align: right;'|<math>- \cot \theta</math>
| |
| − | |-
| |
| − | |style='border-style: solid none solid solid; text-align: right; padding-left: 2em;'|<math>\varphi</math>
| |
| − | |style='border-style: solid none solid none; text-align: right; padding-left: ;'|<math>=</math>
| |
| − | |style='border-style: solid none solid none; text-align: right; padding-left: ;'|<math>2 \pi - \theta</math>
| |
| − | |style='text-align: right;'|<math>- \sin \theta</math>
| |
| − | |style='text-align: right;'|<math>\cos \theta</math>
| |
| − | |style='text-align: right;'|<math>- \tan \theta</math>
| |
| − | |style='text-align: right;'|<math>- \csc \theta</math>
| |
| − | |style='text-align: right;'|<math>\sec \theta</math>
| |
| − | |style='text-align: right;'|<math>- \cot \theta</math>
| |
| − | |}
| |
| − | -->
| |
| | | | |
| | === Relationships between trigonometric functions and inverse trigonometric functions === | | === Relationships between trigonometric functions and inverse trigonometric functions === |
In mathematics, the inverse trigonometric functions (occasionally also called arcus functions, antitrigonometric functions or cyclometric functions are the inverse functions of the trigonometric functions (with suitably restricted domains). Specifically, they are the inverses of the sine, cosine, tangent (trigonometry)|tangent, cotangent, secant, and cosecant functions, and are used to obtain an angle from any of the angle's trigonometric ratios. Inverse trigonometric functions are widely used in engineering, navigation, physics, and geometry.
Notation
Several notations for the inverse trigonometric functions exist. The most common convention is to name inverse trigonometric functions using an arc- prefix: arcsin(x), arccos(x), arctan(x), etc. This notation arises from the following geometric relationships: when measuring in radians, an angle of θ radians will correspond to an arc whose length is rθ, where r is the radius of the circle. Thus in the unit circle, "the arc whose cosine is x" is the same as "the angle whose cosine is x", because the length of the arc of the circle in radii is the same as the measurement of the angle in radians. In computer programming languages, the inverse trigonometric functions are often called by the abbreviated forms asin, acos, atan.
The notations sin−1(x), cos−1(x), tan−1(x), etc., as introduced by John Herschel in 1813, are often used as well in English-language sources—conventions consistent with the notation of an inverse function. This might appear to conflict logically with the common semantics for expressions such as sin2(x), which refer to numeric power rather than function composition, and therefore may result in confusion between multiplicative inverse or reciprocal and compositional inverse. The confusion is somewhat mitigated by the fact that each of the reciprocal trigonometric functions has its own name—for example, (cos(x))−1 = sec(x). Nevertheless, certain authors advise against using it for its ambiguity. Another convention used by a few authors is to use an uppercase first letter, along with a −1 superscript: Sin−1(x), Cos−1(x), Tan−1(x), etc. This potentially avoids confusion with the multiplicative inverse, which should be represented by sin−1(x), cos−1(x), etc.
Since 2009, the ISO 80000-2 standard has specified solely the "arc" prefix for the inverse functions.
Basic concepts
Principal values
Since none of the six trigonometric functions are one-to-one, they must be restricted in order to have inverse functions. Therefore, the result ranges of the inverse functions are proper subsets of the domains of the original functions.
For example, using function in the sense of multivalued functions, just as the square root function  could be defined from
could be defined from  the function
the function  is defined so that
is defined so that  For a given real number
For a given real number  with
with  there are multiple (in fact, countably infinite) numbers
there are multiple (in fact, countably infinite) numbers  such that
such that  ; for example,
; for example,  but also
but also 
 etc. When only one value is desired, the function may be restricted to its principal branch. With this restriction, for each
etc. When only one value is desired, the function may be restricted to its principal branch. With this restriction, for each  in the domain, the expression
in the domain, the expression  will evaluate only to a single value, called its principal value. These properties apply to all the inverse trigonometric functions.
will evaluate only to a single value, called its principal value. These properties apply to all the inverse trigonometric functions.
The principal inverses are listed in the following table.
| Name
|
Usual notation
|
Definition
|
Domain of for real result
|
Range of usual principal value
(radians)
|
Range of usual principal value
(degrees)
|
| arcsine |
|
x = sin(y) |
 |
 |

|
| arccosine |
 |
x = cos(y) |
|
 |

|
| arctangent |
 |
x = tan(y) |
all real numbers |
 |

|
| arccotangent |
 |
x = cot(y) |
all real numbers
|
 |

|
| arcsecant |
 |
x = sec(y) |
 |
 |

|
| arccosecant |
 |
x = csc(y) |
|
 |

|
Note: Some authors define the range of arcsecant to be  , because the tangent function is nonnegative on this domain. This makes some computations more consistent. For example, using this range,
, because the tangent function is nonnegative on this domain. This makes some computations more consistent. For example, using this range,  whereas with the range
whereas with the range  , we would have to write
, we would have to write  since tangent is nonnegative on
since tangent is nonnegative on  but nonpositive on
but nonpositive on  For a similar reason, the same authors define the range of arccosecant to be
For a similar reason, the same authors define the range of arccosecant to be 
If is allowed to be a complex number, then the range of applies only to its real part.
Solutions to elementary trigonometric equations
Each of the trigonometric functions is periodic in the real part of its argument, running through all its values twice in each interval of  :
:
- Sine and cosecant begin their period at
 (where
(where  is an integer), finish it at
is an integer), finish it at  and then reverse themselves over to
and then reverse themselves over to 
- Cosine and secant begin their period at
 finish it at
finish it at  and then reverse themselves over
and then reverse themselves over  to
to 
- Tangent begins its period at
 finishes it at and then repeats it (forward) over
finishes it at and then repeats it (forward) over  to
to
- Cotangent begins its period at finishes it at
 and then repeats it (forward) over to
and then repeats it (forward) over to
This periodicity is reflected in the general inverses, where is some integer.
For example, if  then
then  for some
for some  While if
While if  then
then  for some
for some  where will be even if
where will be even if  and it will be odd if
and it will be odd if  The equations
The equations  and
and  have the same solutions as and
have the same solutions as and  respectively. In all equations above except for those just solved (i.e. except for
respectively. In all equations above except for those just solved (i.e. except for  / and
/ and  /), the integer in the solution's formula is uniquely determined by
/), the integer in the solution's formula is uniquely determined by  (for fixed
(for fixed  and ).
and ).
- Detailed example and explanation of the "plus or minus" symbol

The solutions to  and
and  involve the "plus or minus" symbol
involve the "plus or minus" symbol  whose meaning is now clarified. Only the solution to will be discussed since the discussion for is the same.
We are given between and we know that there is an angle in some give interval that satisfies
whose meaning is now clarified. Only the solution to will be discussed since the discussion for is the same.
We are given between and we know that there is an angle in some give interval that satisfies  We want to find this
We want to find this  The formula for the solution involves:
The formula for the solution involves:

If

(which only happens when

) then

and

so either way,

can only be equal to

But if

which will now be assumed, then the solution to

which is written above as

is shorthand for the following statement:
Either
 for some integer
for some integer 
or else for some integer
for some integer 
Because  and
and  exactly one of these two equalities can hold. Additional information about is needed to determine which one holds. For example, suppose that
exactly one of these two equalities can hold. Additional information about is needed to determine which one holds. For example, suppose that  and that all that is known about is that
and that all that is known about is that  (and nothing more is known). Then
(and nothing more is known). Then

and moreover, in this particular case

(for both the

case and the

case) and so consequently,

This means that
could be either

or

Without additional information it is not possible to determine which of these values
has.
An example of some additional information that could determine the value of
would be knowing that the angle is above the
-axis (in which case

) or alternatively, knowing that it is below the
-axis (in which case

).
- Transforming equations
The equations above can be transformed by using the identities

|
|

|

|

|

|

|
|
|
|
|
|

|
|

|

|

|
|

|
|
|
|

|
|

|
|

|

|
|
|

|
|

|

|

|
|

|
|
|
|

|
|

|
|

|

|
|
|
So for example, by using the equality  , the equation can be transformed into
, the equation can be transformed into  which allows for the solution to the equation
which allows for the solution to the equation  (where
(where  ) to be used; that solution being:
) to be used; that solution being:
 which becomes:
which becomes:

where using the fact that

and substituting

proves that another solution to

is:

The substitution

may be used express the right hand side of the above formula in terms of

instead of

Relationships between trigonometric functions and inverse trigonometric functions
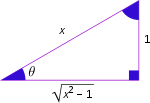
Trigonometric functions of inverse trigonometric functions are tabulated below. A quick way to derive them is by considering the geometry of a right-angled triangle, with one side of length 1 and another side of length then applying the Pythagorean theorem and definitions of the trigonometric ratios. Purely algebraic derivations are longer. It is worth noting that for arcsecant and arccosecant, the diagram assumes that is positive, and thus the result has to be corrected through the use of absolute values and the signum (sgn) operation.
|
|

|

|

|
Diagram
|
|
|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|
|
Relationships among the inverse trigonometric functions
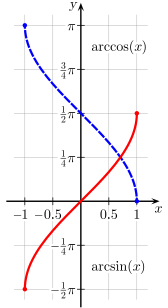
The usual principal values of the arcsin(
x) (red) and arccos(
x) (blue) functions graphed on the cartesian plane.

The usual principal values of the arctan(
x) and arccot(
x) functions graphed on the cartesian plane.

Principal values of the arcsec(
x) and arccsc(
x) functions graphed on the cartesian plane.
Complementary angles:
![{\displaystyle {\begin{aligned}\arccos(x)&={\frac {\pi }{2}}-\arcsin(x)\\[0.5em]\operatorname {arccot}(x)&={\frac {\pi }{2}}-\arctan(x)\\[0.5em]\operatorname {arccsc}(x)&={\frac {\pi }{2}}-\operatorname {arcsec}(x)\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ec43798232f580abb074cf15f3d77692edd36af0)
Negative arguments:

Reciprocal arguments:
![{\displaystyle {\begin{aligned}\arccos \left({\frac {1}{x}}\right)&=\operatorname {arcsec}(x)\\[0.3em]\arcsin \left({\frac {1}{x}}\right)&=\operatorname {arccsc}(x)\\[0.3em]\arctan \left({\frac {1}{x}}\right)&={\frac {\pi }{2}}-\arctan(x)=\operatorname {arccot}(x)\,,{\text{ if }}x>0\\[0.3em]\arctan \left({\frac {1}{x}}\right)&=-{\frac {\pi }{2}}-\arctan(x)=\operatorname {arccot}(x)-\pi \,,{\text{ if }}x<0\\[0.3em]\operatorname {arccot} \left({\frac {1}{x}}\right)&={\frac {\pi }{2}}-\operatorname {arccot}(x)=\arctan(x)\,,{\text{ if }}x>0\\[0.3em]\operatorname {arccot} \left({\frac {1}{x}}\right)&={\frac {3\pi }{2}}-\operatorname {arccot}(x)=\pi +\arctan(x)\,,{\text{ if }}x<0\\[0.3em]\operatorname {arcsec} \left({\frac {1}{x}}\right)&=\arccos(x)\\[0.3em]\operatorname {arccsc} \left({\frac {1}{x}}\right)&=\arcsin(x)\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ecb0a376d9148e3cf65ea6e6ed5fb37752a581c7)
Useful identities if one only has a fragment of a sine table:

Whenever the square root of a complex number is used here, we choose the root with the positive real part (or positive imaginary part if the square was negative real).
A useful form that follows directly from the table above is
 .
.
It is obtained by recognizing that  .
.
From the half-angle formula,  , we get:
, we get:
![{\displaystyle {\begin{aligned}\arcsin(x)&=2\arctan \left({\frac {x}{1+{\sqrt {1-x^{2}}}}}\right)\\[0.5em]\arccos(x)&=2\arctan \left({\frac {\sqrt {1-x^{2}}}{1+x}}\right)\,,{\text{ if }}-1<x\leq 1\\[0.5em]\arctan(x)&=2\arctan \left({\frac {x}{1+{\sqrt {1+x^{2}}}}}\right)\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7dd6a9370a877ca5e198e28b7582bd06b377bdc3)
Arctangent addition formula

This is derived from the tangent addition formula

by letting

In calculus
Derivatives of inverse trigonometric functions
The derivatives for complex values of z are as follows:

Only for real values of x:

For a sample derivation: if  , we get:
, we get:

Expression as definite integrals
Integrating the derivative and fixing the value at one point gives an expression for the inverse trigonometric function as a definite integral:

When x equals 1, the integrals with limited domains are improper integrals, but still well-defined.
Indefinite integrals of inverse trigonometric functions
For real and complex values of z:
![{\displaystyle {\begin{aligned}\int \arcsin(z)\,dz&{}=z\,\arcsin(z)+{\sqrt {1-z^{2}}}+C\\\int \arccos(z)\,dz&{}=z\,\arccos(z)-{\sqrt {1-z^{2}}}+C\\\int \arctan(z)\,dz&{}=z\,\arctan(z)-{\frac {1}{2}}\ln \left(1+z^{2}\right)+C\\\int \operatorname {arccot}(z)\,dz&{}=z\,\operatorname {arccot}(z)+{\frac {1}{2}}\ln \left(1+z^{2}\right)+C\\\int \operatorname {arcsec}(z)\,dz&{}=z\,\operatorname {arcsec}(z)-\ln \left[z\left(1+{\sqrt {\frac {z^{2}-1}{z^{2}}}}\right)\right]+C\\\int \operatorname {arccsc}(z)\,dz&{}=z\,\operatorname {arccsc}(z)+\ln \left[z\left(1+{\sqrt {\frac {z^{2}-1}{z^{2}}}}\right)\right]+C\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e3e2dde92bb82231c4326e45ce8b50e7298688bb)
For real x ≥ 1:

For all real x not between -1 and 1:

The absolute value is necessary to compensate for both negative and positive values of the arcsecant and arccosecant functions. The signum function is also necessary due to the absolute values in the derivatives of the two functions, which create two different solutions for positive and negative values of x. These can be further simplified using the logarithmic definitions of the inverse hyperbolic functions:

The absolute value in the argument of the arcosh function creates a negative half of its graph, making it identical to the signum logarithmic function shown above.
All of these antiderivatives can be derived using integration by parts and the simple derivative forms shown above.
Example
Using  (i.e. integration by parts), set
(i.e. integration by parts), set

Then

which by the simple substitution  yields the final result:
yields the final result:

Resources
Review
Calculus
Licensing
Content obtained and/or adapted from:








